ABB机器人带工具模型显示空间范围
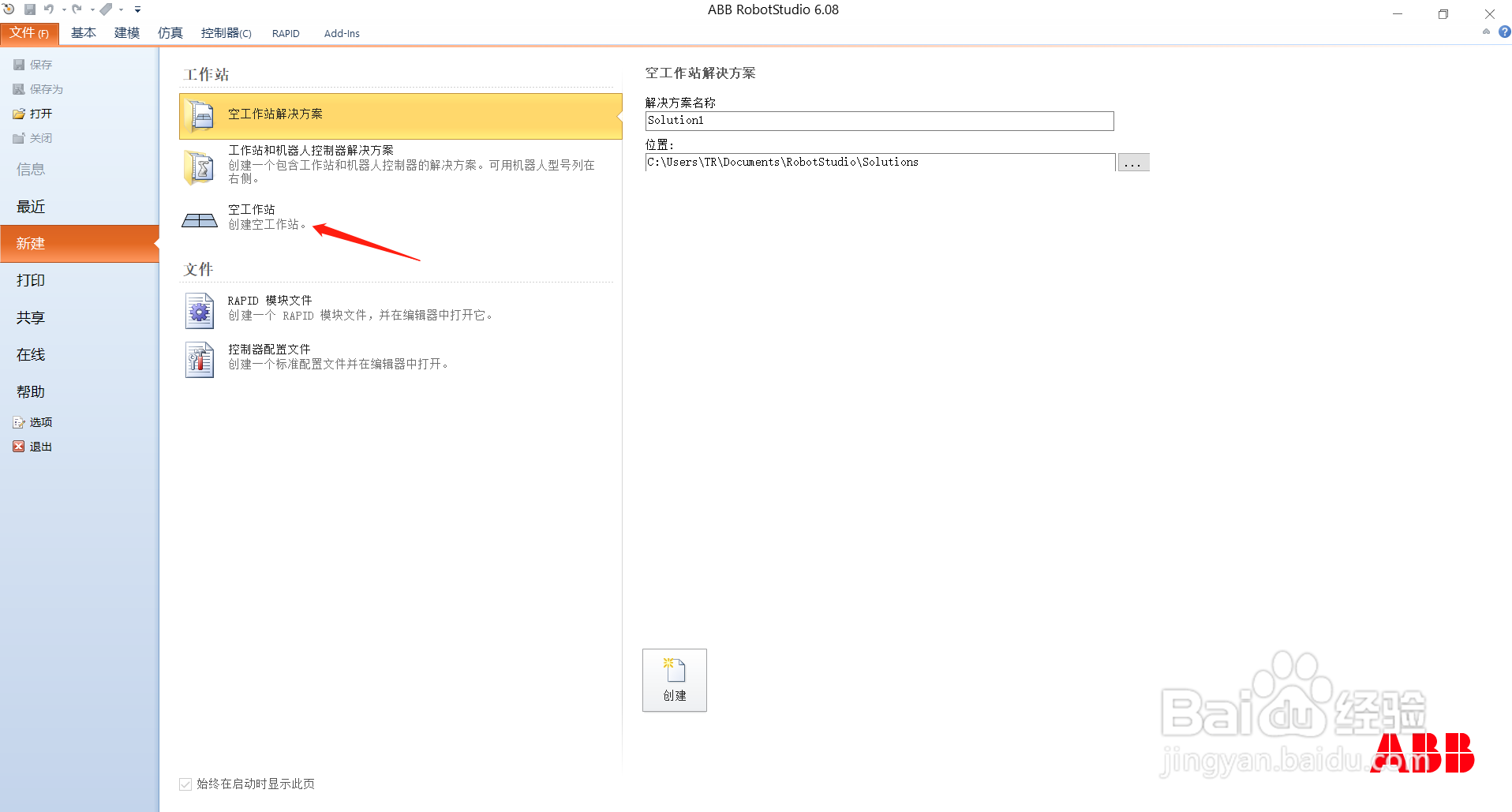
1、创建空工作站
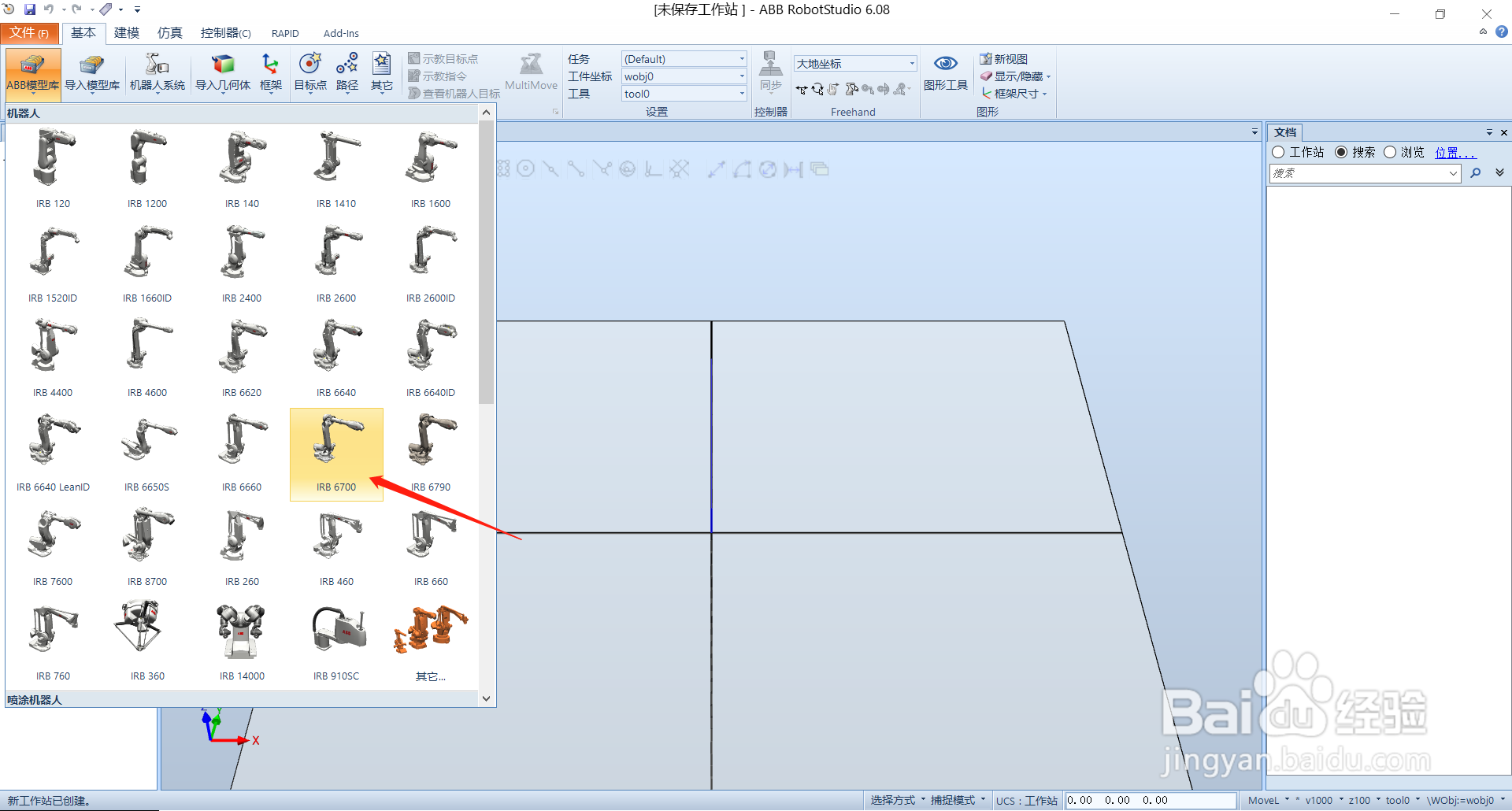
2、导入ABB模型库IRB6700
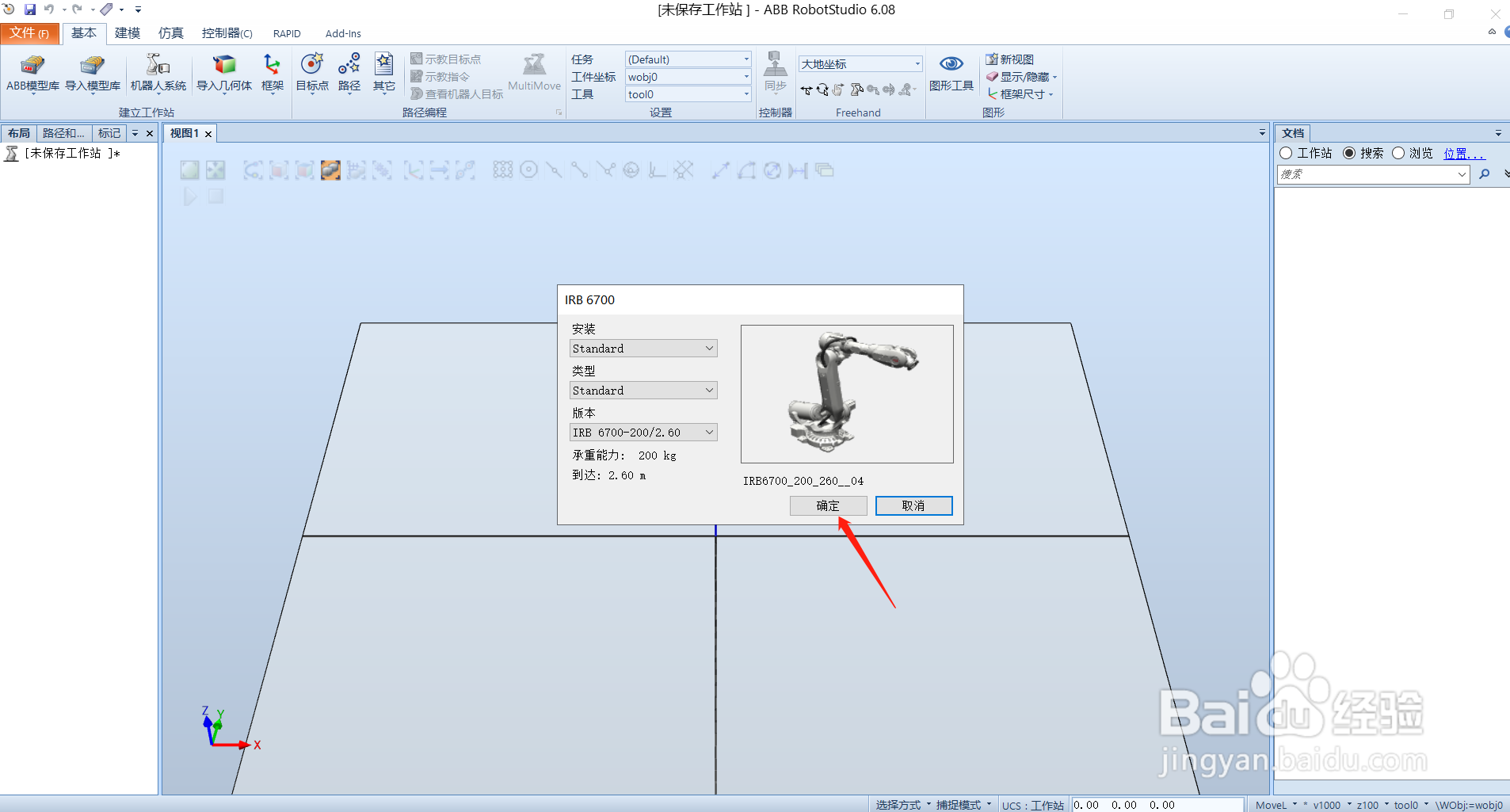
3、配置机械手
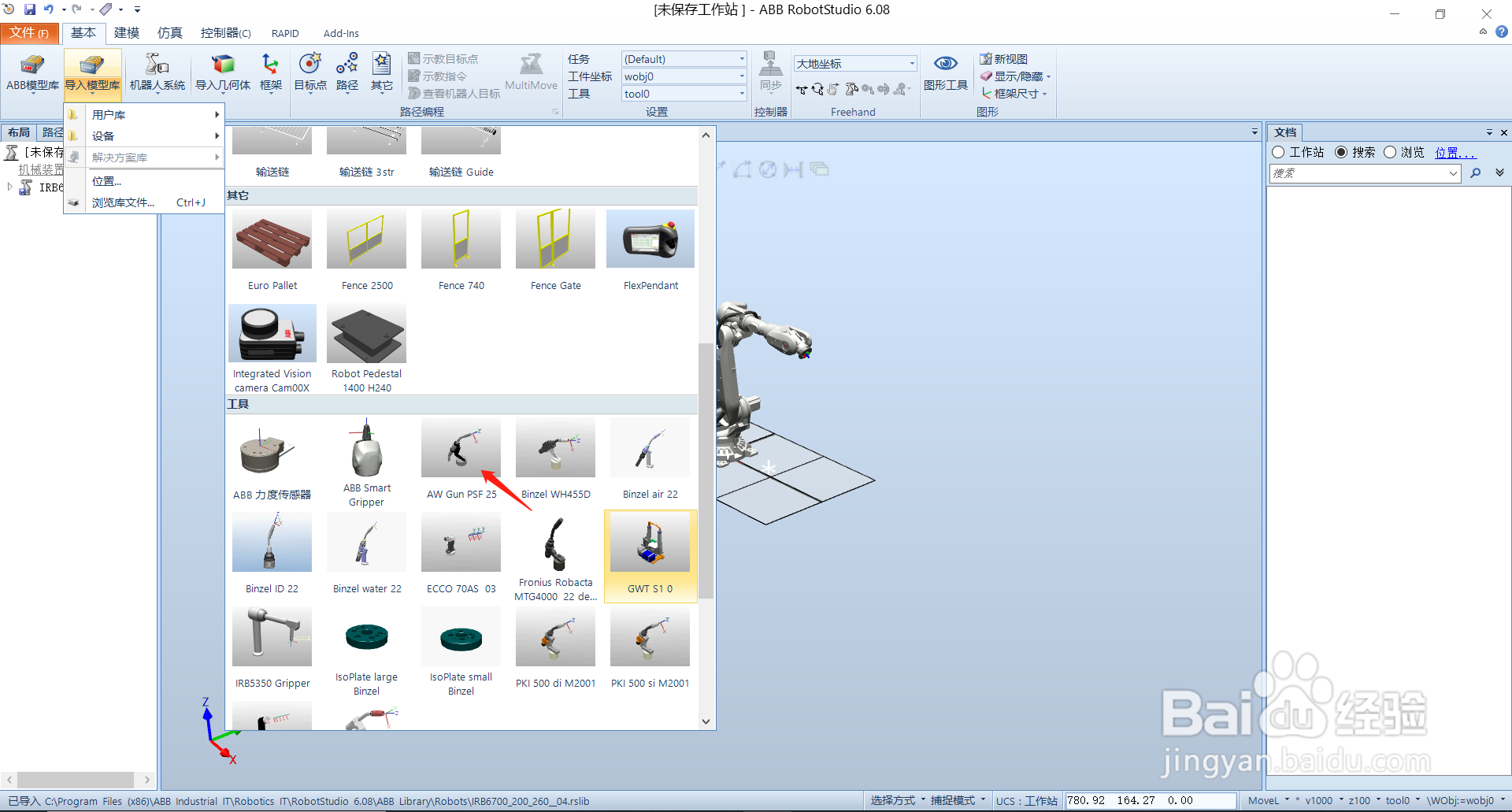
4、导入模型库焊枪
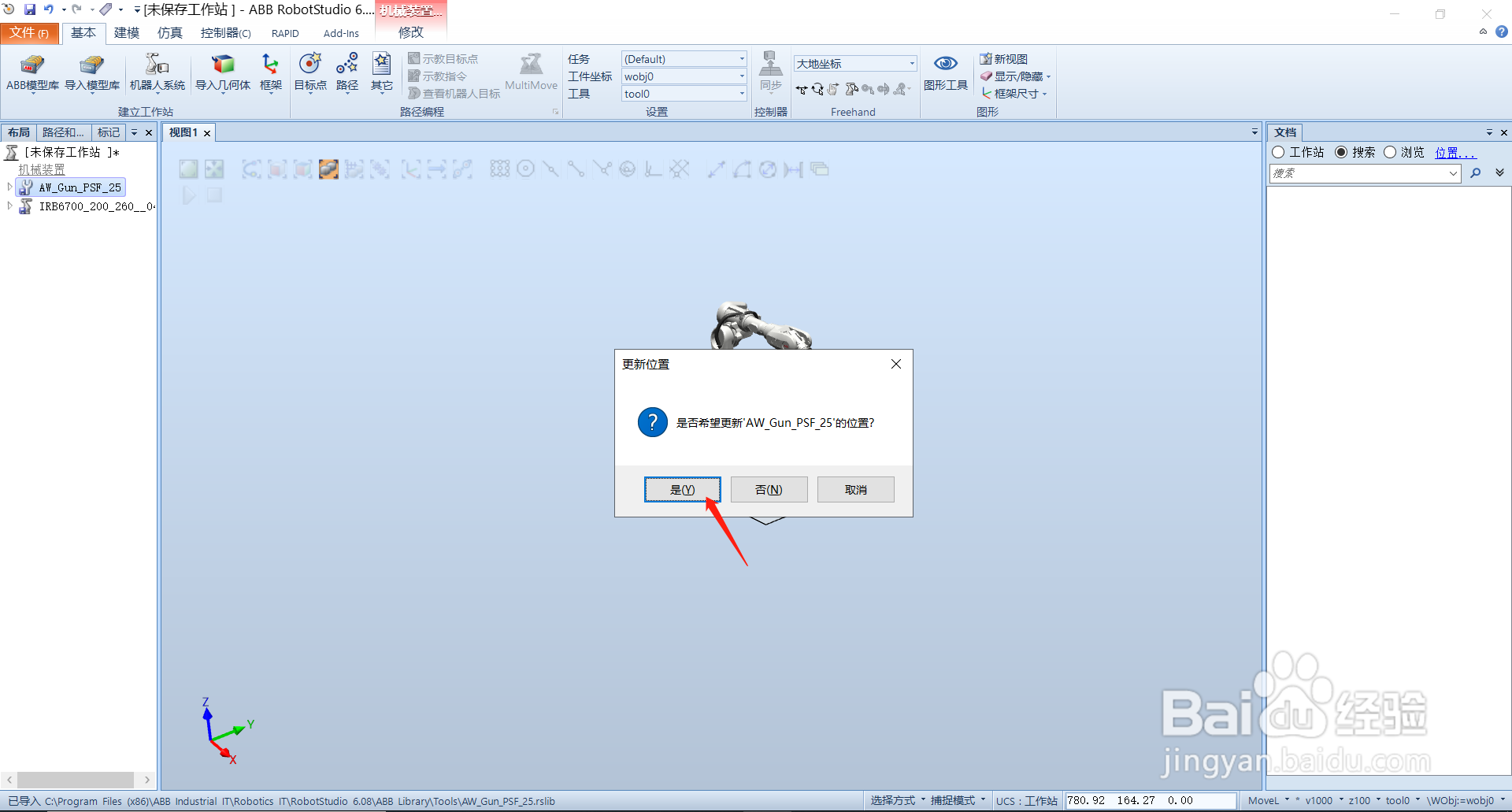
5、焊枪位置更新
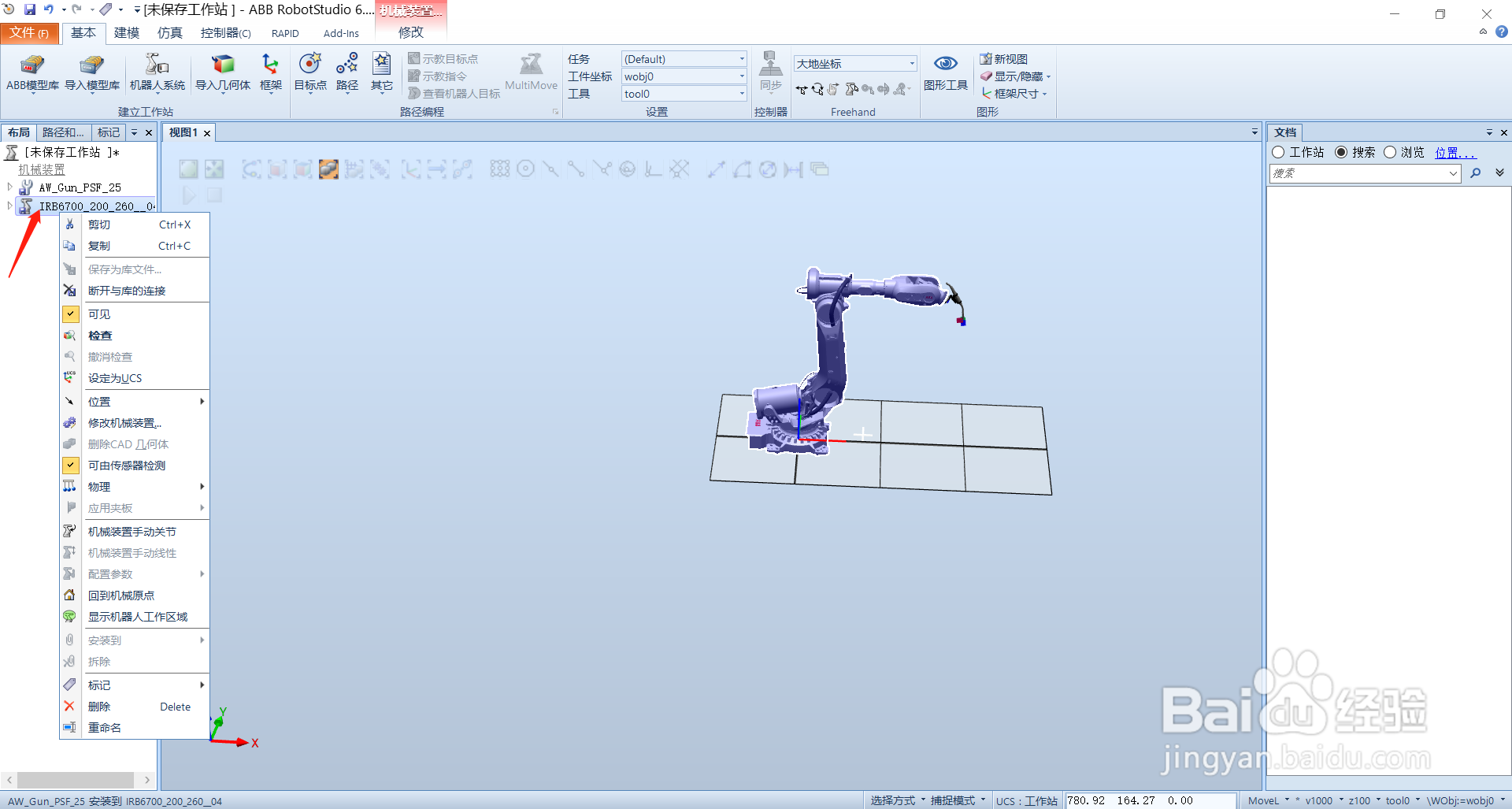
6、右击布局栏里面的IRB6700
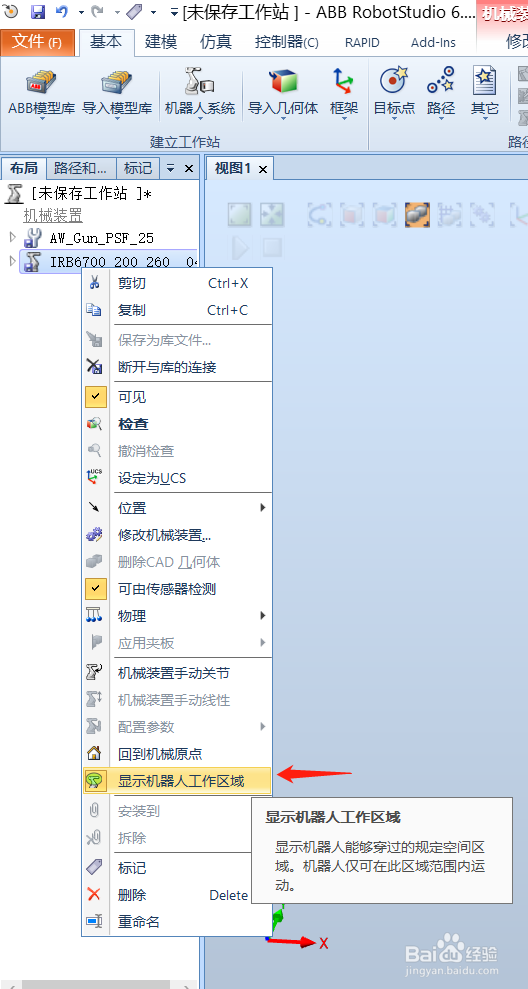
7、选择显示机器人工作区域
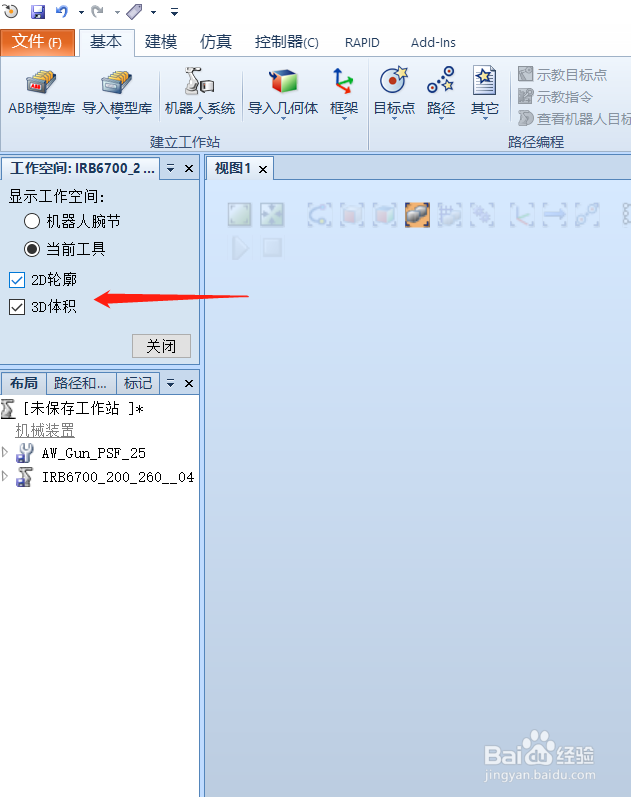
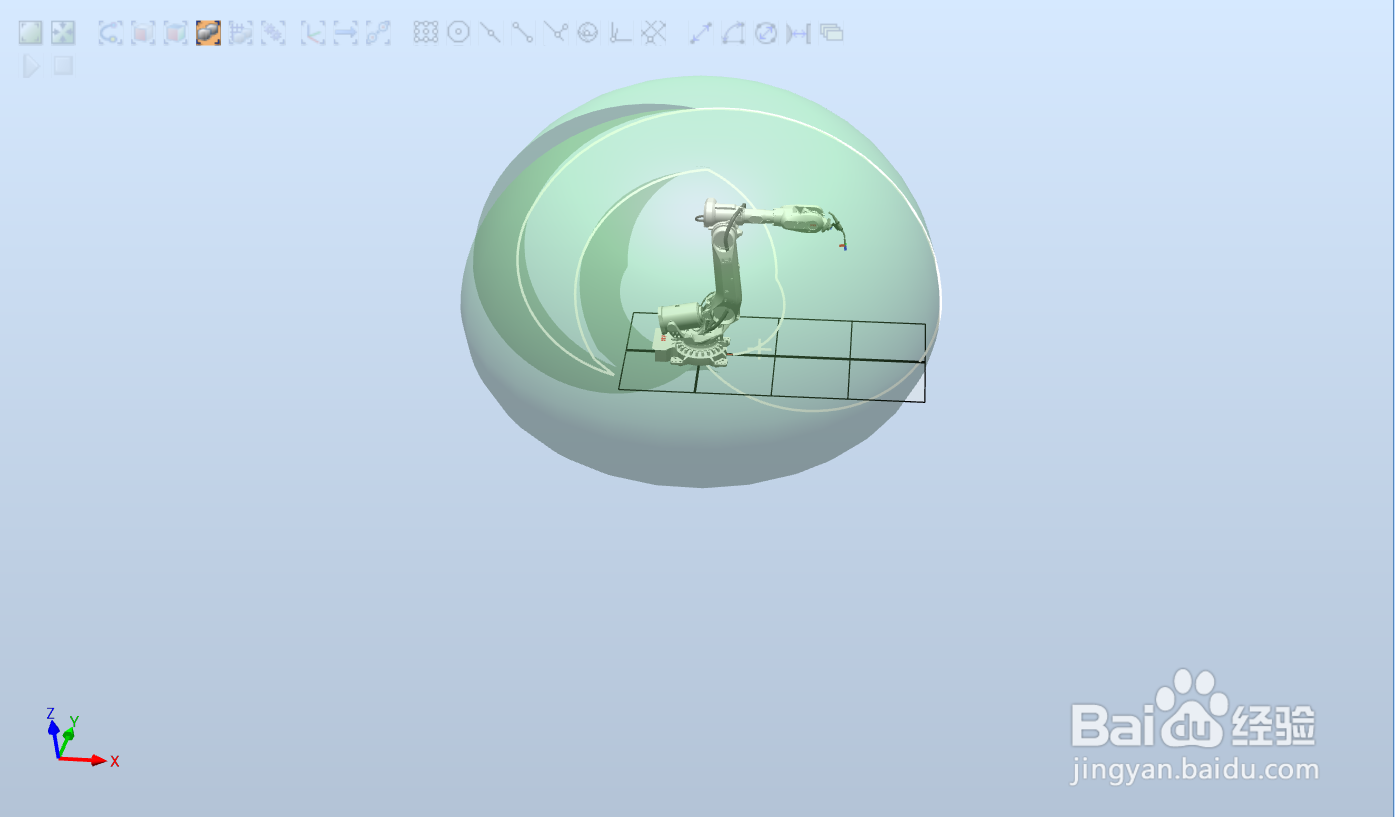
8、选择3D体积
9、查看机械手带工具的空间范围
阅读量:113
阅读量:123
阅读量:54
阅读量:100
阅读量:82
1、创建空工作站
2、导入ABB模型库IRB6700
3、配置机械手
4、导入模型库焊枪
5、焊枪位置更新
6、右击布局栏里面的IRB6700
7、选择显示机器人工作区域
8、选择3D体积
9、查看机械手带工具的空间范围